ロボット共通ソフトウェア技術講座 受講申し込み
- 提供: NEDO特別講座プロジェクト
NEDO特別講座プロジェクトでは、以下の「ロボット共通ソフトウェア技術」に関する講習会をYouTubeにて2020年3月29日より、オンデマンド配信しております。 視聴するには、以下の申し込みボタンからフォームにて所定の事項をご記入ください。メールにて視聴リンクをお送りいたします。

目次
1. ロボット共通ソフトウェア技術 基礎編
1.1. ROS体験コース
インストール不要で,USB一本とパソコンがあれば実行が可能なROS体験ツールを使った体験コース.とりあえずROS環境をお試して使ってみたいという方向けです.
1.2. ROS入門講座
本講座は、主に「ROSとは何か?」に注目し、技術的な側面ではなく、ROSを活用するために必要な背景知識の獲得を目標とした内容となっております。
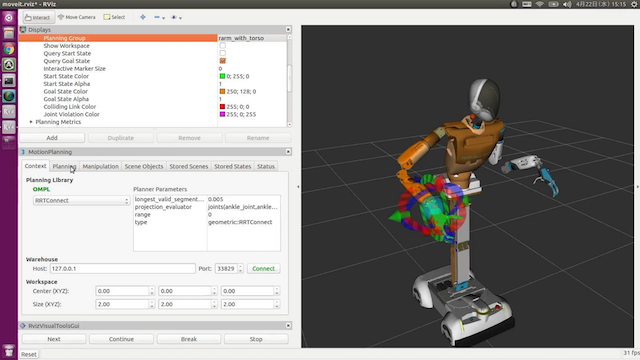
1.3. MoveIt!体験コース
NEDO「ロボット活用型市場化技術開発プロジェクト(市場化プロジェクト)」(2017-2019年度)において開発された,ロボット共通ソフトウェアのUSB実行環境を活用して,いくつかのタイプのロボットアームをMoveIt!を用いて制御し,何らかの作業を行うロボットシステムとしてインテグレーションする方法について学ぶことができます.
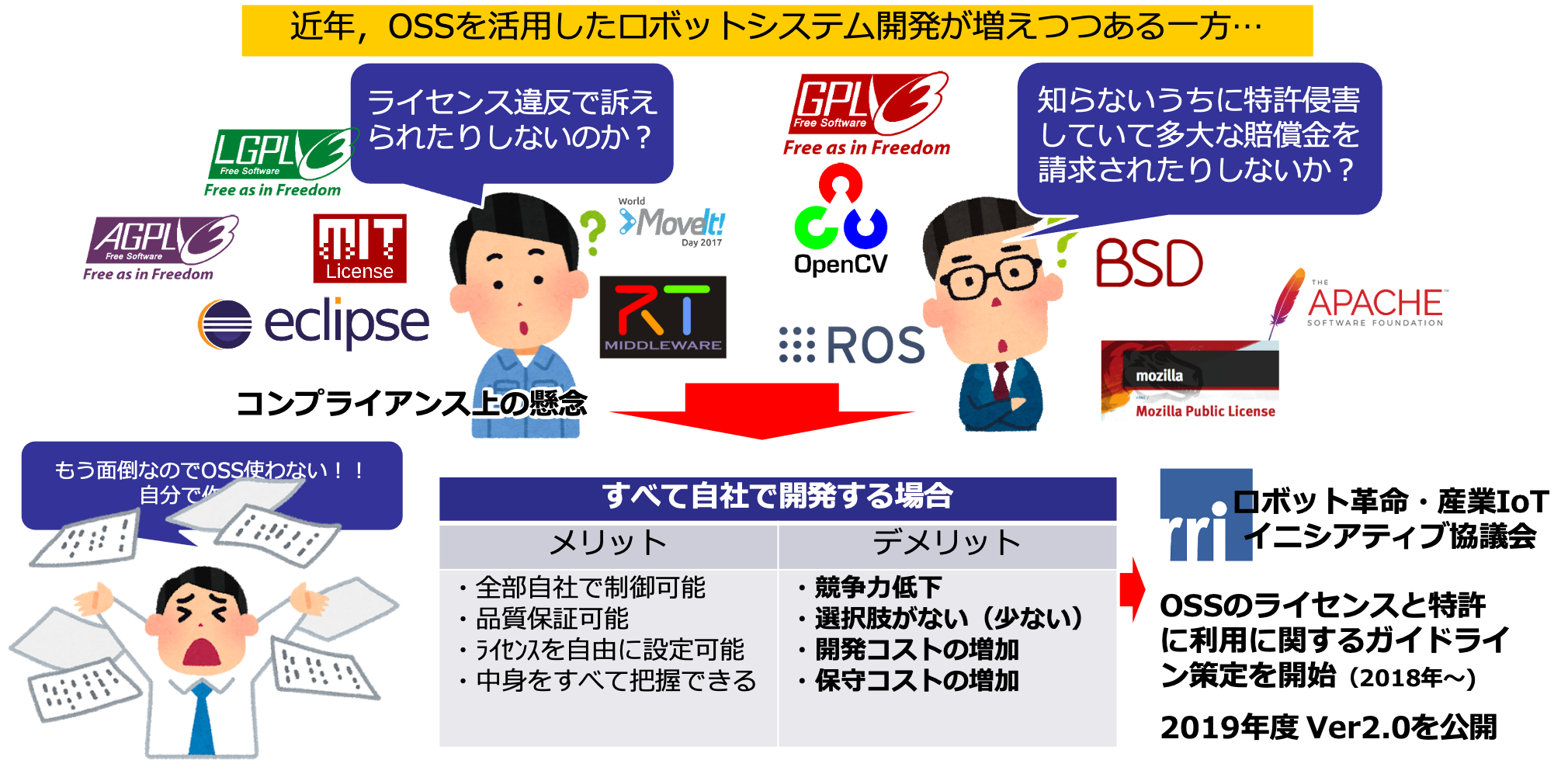
1.4. OSS活用のためのライセンス解説コース
このコースでは、RRI(ロボット革命・産業IoTイニシアティブ協議会)のロボットライセンス・調査検討委員会が2020年6月にとりまとめた、「オープンソースを活用したロボット開発のためのライセンス・特許ガイドライン Version 2.0」に基づき、オープンソースのライセンスの取り扱いについて、ロボットシステムに特有の事情にも考慮しつつ、解説いたします。
2. 市場化プロジェクト成果活用コース
2.1. モバイルマニピュレーションコース
- 提供:THK株式会社,名城大学
- 概要:本コースの(1)と(2)は,プラットフォームとしてのロボットハードウェアの説明と,その上で動作するソフトウェアプラットフォームの解説を行っています. 相互に補完関係があるため,どちらを先にご覧になって頂いても構いません.
(1)では,プラットフォームロボットして開発されたSEED Solutionsの概要を説明します. 引き続き,SEED Systemとそれを支えるスマートアクチュエーター,Aero Systemをご紹介し, それらが組み合わさったロボットプラットフォームのいくつかの構成例をご紹介します.
その上で,(2)では,プログラマ向けのROSに関する基礎講座(プログラム開発演習付き)から始まり, (1)でご紹介したSEED-Noidの制御,地図生成,経路計画とシミュレーション環境での実行, 最後にモバイルマニピュレーションを実行するまでを解説しています(演習付き).
対象:ROSの基本的な知識を持ち,ROS環境におけるプログラミングスキルの獲得を目指している方向け(演習の実施には,ROS環境必須)
2.1.1. ロボットプラットフォーム技術
- 第1部 SEED Solutions 概要(14分)
- 第2部 SEED System(13分)
- 第3部 SEED Smart Actuator(13分)
- 第4部 Aero System(10分)
- 第5部 SEED Platform Robots(12分)
2.1.2. 共通ソフトウェア技術
第一部,第三部,第四部は演習付き
- 第1部 ROSの基礎(42分+演習解説9分)
- 第2部 ROSでのSEED-Noid制御基礎(20分)
- 第3部 地図生成・ナビゲーション(33分)
-
第4部 SEED-Noidを用いたマニピュレーション(41分)
- ※ ご興味をお持ちの方には,より進んだ実機を用いた演習の受講が可能です(2021年3月現在).詳細は,本資料最後の連絡先までお問い合わせください.
- ※ SEED Solutionsに関する情報へのリンク:本内容の実施のために活用可能なLive USB作成の情報へのリンクもあります.
- URL https://www.seed-solutions.net/?q=seed_jp/node/7
2.2. 3Dロボットビジョンプラットフォーム
- 提供: 株式会社 YOODS
-
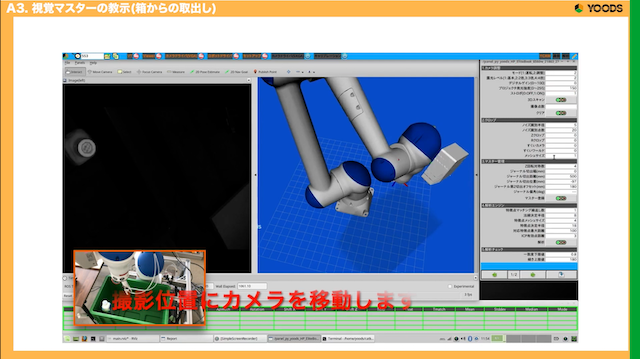
概要: (1)は,産業用3Dハンドアイ高精度3Dカメラとそれを活用できるロボット3Dビジョンソフトウェアプラットフォームの利用方法に関するチュートリアルです.関連ソフトウェアのインストールから始まり,起動,パラメータ設定などを行い,二値化処理と表示,3D点群データの計測と出力,サンプルプログラムによる点群処理の例を説明しています. (2)では,3Dカメラの本格的な産業応用の一例として,ビジョンデータを用いたロボットマニピュレーションの実例として,ビジュアルティーチと呼ばれるシステムのインストール・設定から利用までを解説します.作業対象物の精密な位置決めを不要とする技術の一例をご覧ください. 対象:ROSの基本的な知識を持ち,ROS環境におけるプログラミングの初歩を理解している方向け(チュートリアルの実施には,ROS環境必須)
- (1)3Dロボットビジョンプラットフォーム「RoVI」入門(37分)
- (2)ビジュアルティーチ入門(45分)
3. ROS応用コース
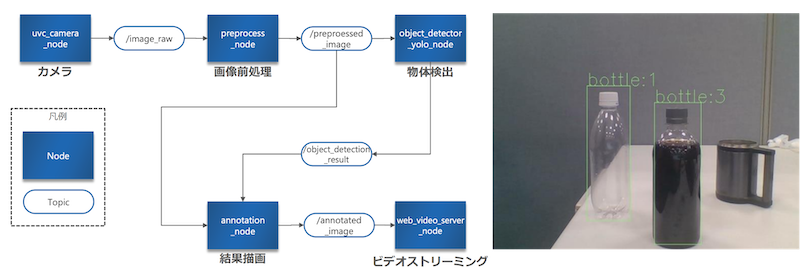
※ ROS物体検知システム構築チュートリアル付き
3.1. 画像処理・AI技術活用コース
- 提供: 株式会社セック様ご提供
- 概要:
- (1) 前編では,ロボットシステムにおけるAI活用事例の解説として,ロボットマニピュレーションのための画像認識技術への応用やロボットアーム制御,近年,急速に進歩を遂げている自動車の自動運転技術への応用について簡単に紹介します.後半では,AIを活用したロボットシステムのチュートリアルとして,カメラ画像による物体追跡システムの構築を実際に行ってみます.
- (2) 後編では,AIを活用したロボットシステムの設計,運用のポイントについて解説します.少し上級者向けの内容となっております.
-
対象: ROSの基本的な知識を持ち,ROS環境におけるプログラミングの初歩を理解している方向け(チュートリアルの実施には,ROS環境必須)
- (1) 画像処理・AI技術活用コース 前編(25分)
- (2) 画像処理・AI技術活用コース 後編(38分)
4. 本講座に関する情報
本講座に関する連絡先:
国立大学法人埼玉大学内「ロボット共通ソフトウェア技術講座」事務局
e-mail: nedo_kouza@mech.saitama-u.ac.jp
※ @ は小文字に置き換えてください。
本講座は,NEDOが実施する「NEDOプロジェクトを核とした人材育成、産学連携等の総合的展開:システム・インテグレーションを加速するロボット共通ソフトウェア技術を維持・普及・発展させていくための人材の育成・交流・研究の活性化に係る特別講座」のご支援のもとに実施されています.