clear_costmap_recovery¶
目次
1. 概要¶
このパッケージは、Navigationスタックが使用するコストマップの特定の領域の外側を静的マップに戻すことでスペースをクリアしようとするNavigationスタックのリカバリ動作を提供します。
- 管理状態:管理済み
- 管理者:David V. Lu!! <davidvlu AT gmail DOT com>, Michael Ferguson <mfergs7 AT gmail DOT com>, Aaron Hoy <ahoy AT fetchrobotics DOT com>
- 著者:Eitan Marder-Eppstein, contradict@gmail.com
- ライセンス:BSD
- ソース:git git https://github.com/ros-planning/navigation.git (branch: melodic-devel)
2. clear_cost_map_recoveryの概要¶
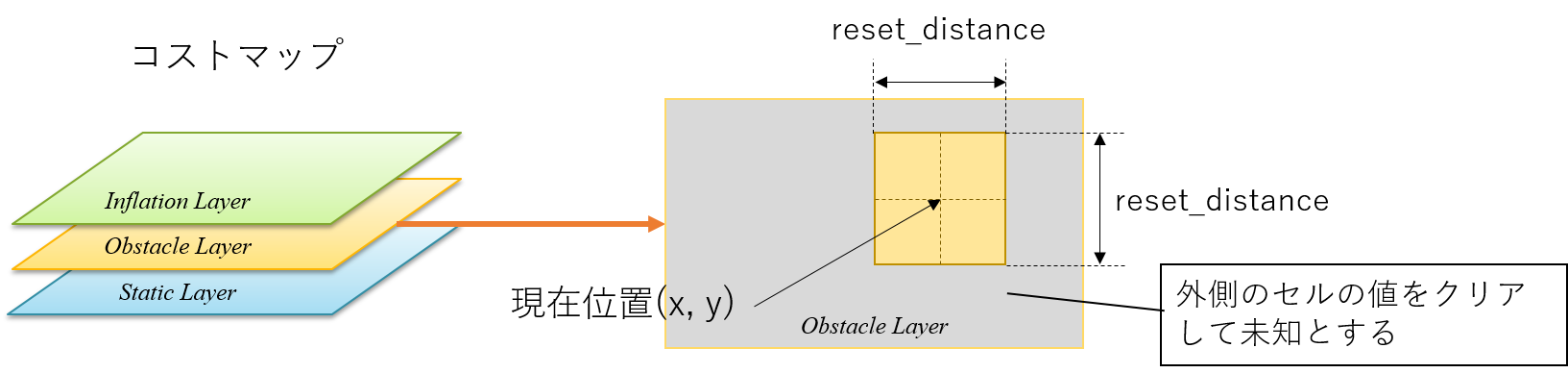
clear_costmap_recovery::ClearCostmapRecoveryは、ロボットから特定の半径( reset_distance )の外側を静的マップに戻すことにより、Navigationスタックの コストマップ 内のスペースをクリアする単純なリカバリ動作です。 nav_core パッケージに含まれるnav_core::RecoveryBehaviorインタフェースに準拠しており、 move_base ノードのリカバリ動作 プラグイン として使用できます。
クリア対象のコストマップを affected_maps パラメータで指定することが可能です。また、クリア対象のレイヤーを layer_names パラメータで複数指定することもできます。
3. ClearCostmapRecovery¶
clear_costmap_recovery::ClearCostmapRecoveryオブジェクトは、その機能を C++ ROSラッパー として公開します。これは、初期化時に指定されたROS名前空間(以降、nameと仮表記)内で動作します。 nav_core パッケージにあるnav_core::RecoveryBehaviorインタフェースに準拠しています。
clear_costmap_recovery :: ClearCostmapRecoveryオブジェクトの作成例:
#include <tf/transform_listener.h>
#include <costmap_2d/costmap_2d_ros.h>
#include <clear_costmap_recovery/clear_costmap_recovery.h>
...
tf::TransformListener tf(ros::Duration(10));
costmap_2d::Costmap2DROS global_costmap("global_costmap", tf);
costmap_2d::Costmap2DROS local_costmap("local_costmap", tf);
clear_costmap_recovery::ClearCostmapRecovery ccr;
ccr.initialize("my_clear_costmap_recovery", &tf, &global_costmap, &local_costmap);
ccr.runBehavior();
4.2 ROSパラメータ¶
| パラメータ名 | 内容 | 型 | 単位 | デフォルト |
|---|---|---|---|---|
| ~<name>/reset_distance | ロボットの位置を中心とする正方形の辺の長さ。その外側の障害物は、静的マップに戻されたときにコストマップから削除されます。 | double | m | 3.0 |
| ~<name>/force_updating | クリア後にコストマップの更新を強制するため、更新スレッドを待つ必要はありません。(ROSWikiに未記載のパラメータ) | bool | - | false |
| ~<name>/affected_maps | "local":ローカルのコストマップのみをクリアする。
"global":グローバルのコストマップのみをクリアする。
"both":両方のコストマップをクリアする。(ROSWikiに未記載のパラメータ)
|
string | - | both |
| ~<name>/layer_names | クリアするレイヤー名。複数指定可。(ROSWikiに未記載のパラメータ) | vector<string> | - | obstacles |
4.3 C++ API¶
C++ clear_costmap_recovery::ClearCostmapRecoveryクラスは、 nav_core パッケージにあるnav_core::RecoveryBehaviorインタフェースに準拠しています。詳細なドキュメントについては、 ClearCostmapRecoveryドキュメント を参照してください。