nav_core¶
目次
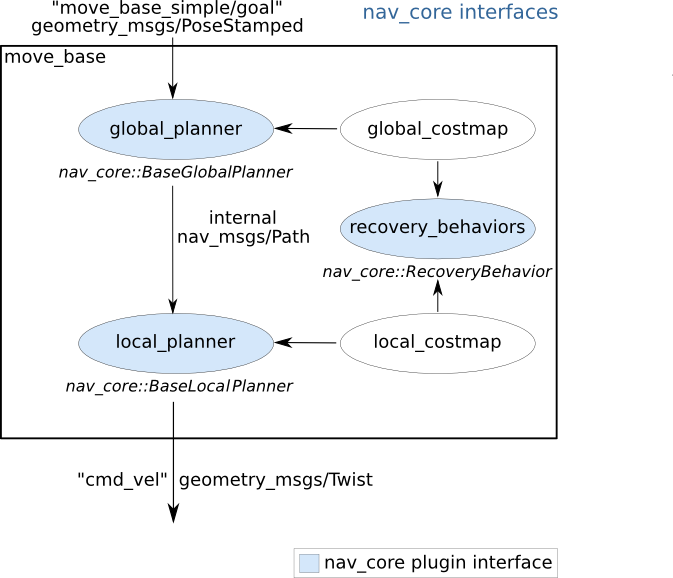
2. nav_coreの概要¶
nav_coreパッケージには、Navigationスタックの主要なインタフェースが含まれています。 move_base ノードで プラグイン として使用する全てのプランナーとリカバリ動作は、これらのインタフェースに従う必要があります。
3. BaseGlobalPlanner¶
nav_core::BaseGlobalPlannerは、ナビゲーションで使用されるグローバルプランナーのためのインタフェースを提供します。 move_base ノードのプラグインとして記述されたすべてのグローバルプランナーは、このインタフェースに従う必要があります。nav_core::BaseGlobalPlannerインタフェースを使用する現在のグローバルプランナーは次のとおりです。
- global_planner - navfnのより柔軟な代替として構築された、高速で補間されたグローバルプランナー。(pluginlib名: "global_planner/GlobalPlanner")
- navfn - ナビゲーション機能を使用してロボットのパスを計算するグリッドベースのグローバルプランナー。(pluginlib名: "navfn/NavfnROS")
- carrot_planner - ユーザー指定の目標点を取得し、その目標点が障害物にある場合でも、ロボットをできるだけ近くに移動しようとする単純なグローバルプランナー。(pluginlib名: "carrot_planner/CarrotPlanner")
3.1 APIの安定性¶
C++ API が安定しています。
3.2 BaseGlobalPlanner C++ API¶
nav_core :: BaseGlobalPlannerのC ++ APIに関するドキュメントは、 BaseGlobalPlannerのドキュメント にあります。
4. BaseLocalPlanner¶
nav_core :: BaseLocalPlannerは、ナビゲーションで使用されるローカルプランナーのためのインタフェースを提供します。 move_base ノードのプラグインとして記述されたすべてのローカルプランナーは、このインタフェースに従う必要があります。nav_core :: BaseLocalPlannerインターフェースを使用する現在のローカルプランナーは次のとおりです。
- base_local_planner - ローカルコントロールへの Dynamic Window Approach(DWA)およびTrajectory Rollout Approachの実装を提供します。
- dwa_local_planner - base_local_planner のDWAよりもクリーンで理解しやすいインタフェースを備え、より柔軟性の高いホロノミックロボット用のy軸変数を備えたモジュール式DWA実装です。
- eband_local_planner - SE2マニホールドでのElastic Bandメソッドを実装します。
- teb_local_planner - オンライン軌道最適化のためのTimed-Elastic-Bandメソッドを実装します。
4.2 BaseLocalPlanner C++ API¶
nav_core :: BaseLocalPlannerのC ++ APIに関するドキュメントは、 BaseLocalPlannerドキュメント にあります。
5. RecoveryBehavior¶
nav_core::RecoveryBehaviorは、ナビゲーションで使用されるリカバリ動作のインタフェースを提供します。 move_base ノードのプラグインとして記述されたすべてのリカバリ動作は、このインタフェースに準拠する必要があります。nav_core::RecoveryBehaviorインタフェースを使用した現在のリカバリ動作は次のとおりです。
- clear_costmap_recovery - move_baseが使用するコストマップを、ユーザーが指定した範囲の外側について、静的マップの値に戻すリカバリ動作。
- rotate_recovery - ロボットを360度回転させてスペースをクリアすることを試みるリカバリ動作。
5.2 RecoveryBehavior C++ API¶
nav_core :: RecoveryBehaviorのC ++ APIに関するドキュメントは、 RecoveryBehaviorのドキュメント にあります。